
 |
Charlotte Stonestreet
Managing Editor |
Editor's Pick
New miniature rescue robot
28 January 2015
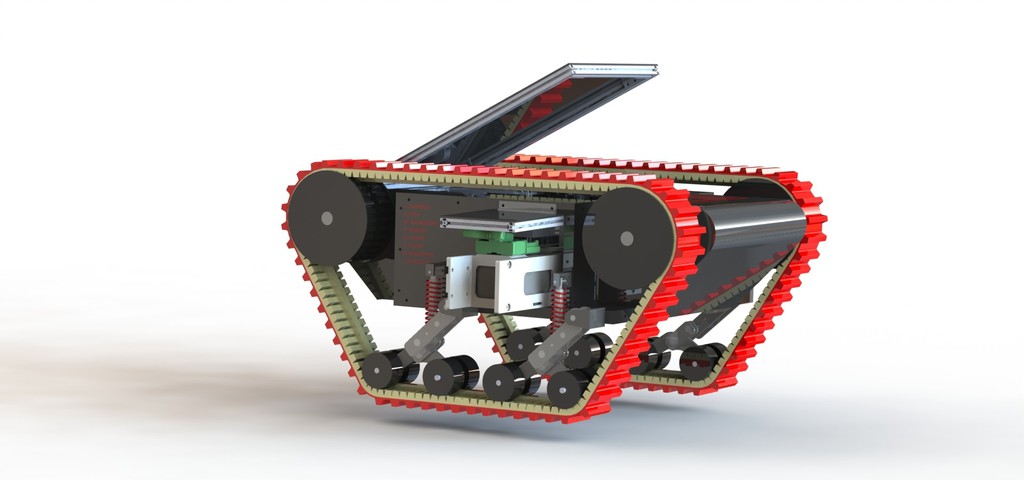
Warwick Mobile Robotics (WMR), a research project carried out by a team of undergraduates at the University of Warwick, is developing a completely new miniature urban search and rescue (M-USAR) robot.

The new M-USAR robot is driven using two of Maxon’s EC – 4 pole 22 90W brushless motors (part number 323217). Each motor is connected to a GP 32 C planetary gearhead (part number 166945) offering a 123:1 reduction in motor output speed. This generates the required torque to allow the robot to negotiate difficult obstacles. The high motor efficiency (88%) makes maximum use of the available battery power.
Notable design aspects and achievements of the 2014/15 robot are:
- The robot is smaller than any search and rescue robot designed by WMR before, fitting into a 508mm x 393mm x 266mm envelope of space
- The chassis uses lightweight extruded aluminium beams. This allows easy chassis assembly and modification whilst maintaining a strong design
- The track design has been simplified to a tank style to improve robot reliability whilst still allowing a high level of manoeuvrability
- A sensor array has been put together to help map the arenas and identify victims. This includes CO2 and infra-red sensors, front and rear facing cameras, speaker and microphone and a LIDAR mapping sensor
- A suspension system has been designed to improve manoeuvrability and traction over difficult terrain
- Dynamic tensioning has been designed into the tracks to reduce the risk of tracks going slack and coming off the robot
- The 2mm thick aluminium shell is designed to act as a heat sink for the internal components. A fan helps to distribute the heat within the robot evenly
- An Xbox control pad is used to control the robot via Wi-Fi for intuitive driving control
- High quality Maxon Motor gearheads and motors have been used to drive the tracks (one motor for the left track and one motor for the right track) to improve robot reliability
The robot is still being developed with the aim of manufacturing it before Easter 2015. Testing will then be carried out in house at the University of Warwick to evaluate the robot’s capabilities.
In past years WMR have attended the European RoboCup Competition. The aim of this contest is to promote research and development into physical robotic agents for disaster search and rescue. The competition helps to increase awareness of the challenges involved in search and rescue applications, provide objective evaluation of robotic implementations in representative environments and promote collaboration between researchers.
The competitors are given a scenario, such as a devastated building, and the robot has to scout out the area and find as many simulated victims as possible. They have to find their targets, determine their situation, state and location and then report back their findings. Points are scored through mapping of the arena, good mobility over the obstacles and victim identification using visual, thermal and audio equipment.
Past achievements at the European RoboCup competition includes finishing in second place in 2012, first place in 2010 and Best in Class for Mobility for 2012, 2011, 2010 and 2009. In 2013, the WMR team achieved 10th place at the World RoboCup competition and were the only UK entry. This year WMR is not attending the RoboCup competition as the new robot will not be developed enough to enter. The robot is, however, being designed with the competition rules in mind. This will allow the team to create an excellent platform M-USAR robot which can be developed by the 2015/16 team for the competition in 2016.
- No related articles listed
 |








