
 |
Charlotte Stonestreet
Managing Editor |
| Home> | POWER TRANSMISSION | >Brakes | >Mini brake for robot joints |
ARTICLE
Mini brake for robot joints
20 April 2015
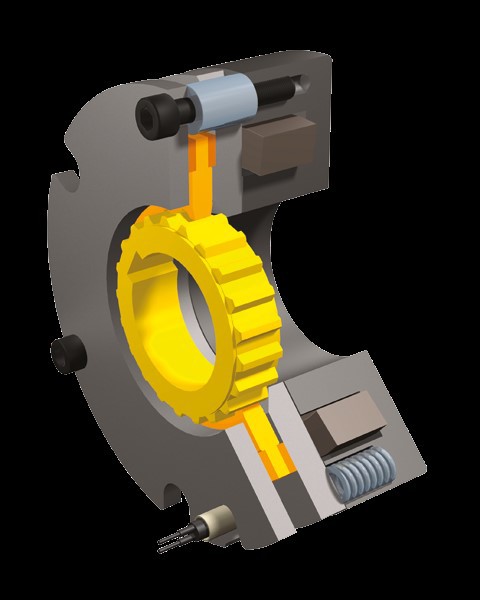
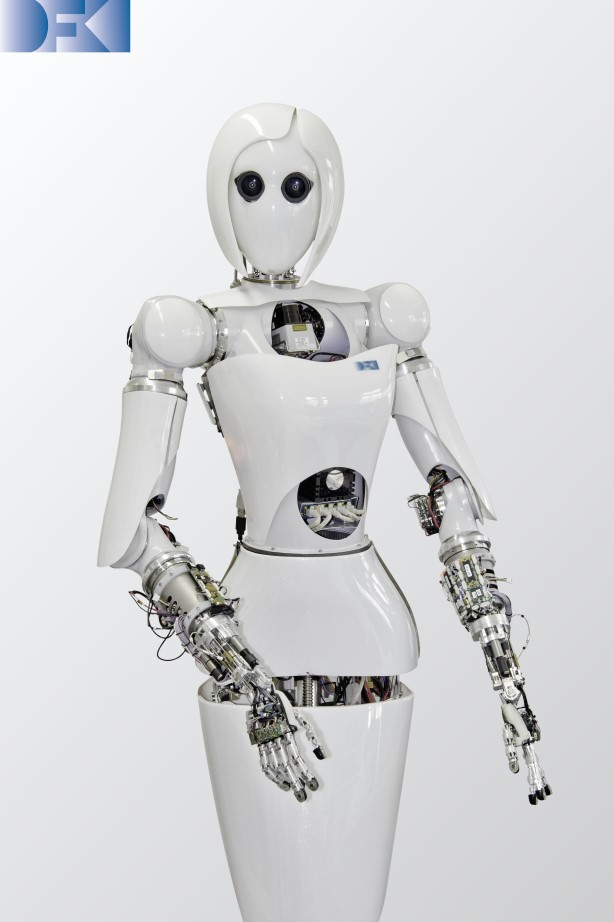
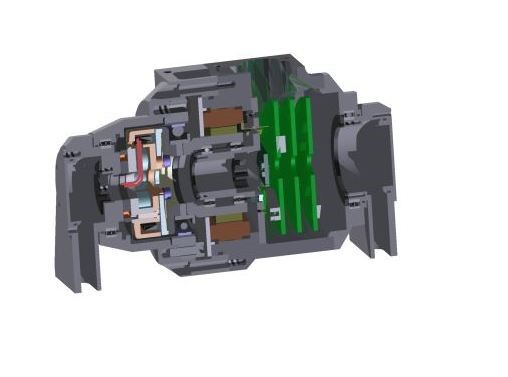
mayr power transmission has developed a mini brake especially designed for intelligent joints, such as those found on the energy-efficient SpaceClimber climbing robot.

When the SpaceClimber walks with its upper body horizontal across an even surface, the brake reliably holds the joint in position and prevents the input and output from turning when the motor is switched off.
"Using this brake, the joint need not be energised permanently to hold the position, and this saves energy," says the DFKI project manager, Dr.-Ing. Sebastian Bartsch.
The brake has a holding torque of 0.28 Nm and only weighs 120g with an outer diameter of 40.5mm.
MORE FROM THIS COMPANY
- Reliable monitoring of safety brakes in servo systems
- Reliable shaft couplings for all drive constellations
- A shopping guide: What to observe when selecting brakes for safety-critical applications
- Overload protection
- Pushed to the limit
- Accurate measuring results
- Smart safety for vertical axes
- High performance in a compact design
- Intelligent brake control
- Roba-linearstop Gets Dynamic Brake Approval
RELATED ARTICLES
GALLERY
 |
 |
 |
OTHER ARTICLES IN THIS SECTION








